Control and Motion Planning Studies for Balancing Robots (2009 - present)
|
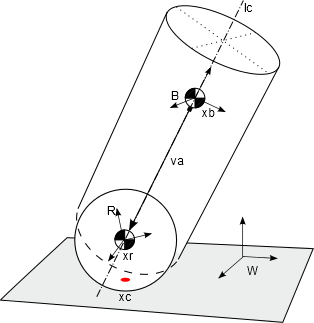
Mobility through balancing on spherical wheels has recently become a popular research topic. Unlike traditional wheeled platforms, the operation of such platforms depends heavily on understanding and working with system dynamics. This study aims to develop control and motion planning schemes for underactuated balancing mobile platforms, especially for spherical wheeled Ballbot. All BallBots move based on the same motion principle: The manipulation of the spherical wheel through rollers attached to the actuators on the body, resulting in a nonholonomic, underactuated motion. We are interested in this motion, and accurate control of associated dynamics for fast maneuvers and agile motions of the system. |
On the Stability of Legged Locomotion (2013 - present)
|
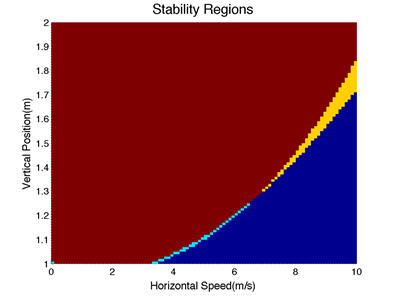
Simple spring-mass models can accurately represent legged locomotion and hence the legged robots. Especially, Spring-Loaded Inverted Pendulum (SLIP) model is the mostly used and widely accepted model due to its simplicity and explanatory nature. Although there are several deadbeat control algorithms developed to control the locomotion of SLIP model, a detailed investigation for analysis and control of periodic gaits for SLIP model has not been presented, yet. The goal of this study is to perform a fixed point analysis for the SLIP model in order to make a concrete stability analysis.
|